ROV technology |
ROV.net |

ROV Books |
||||||||||||
|
||||||||||||||
| ||||||||||||||||||
|
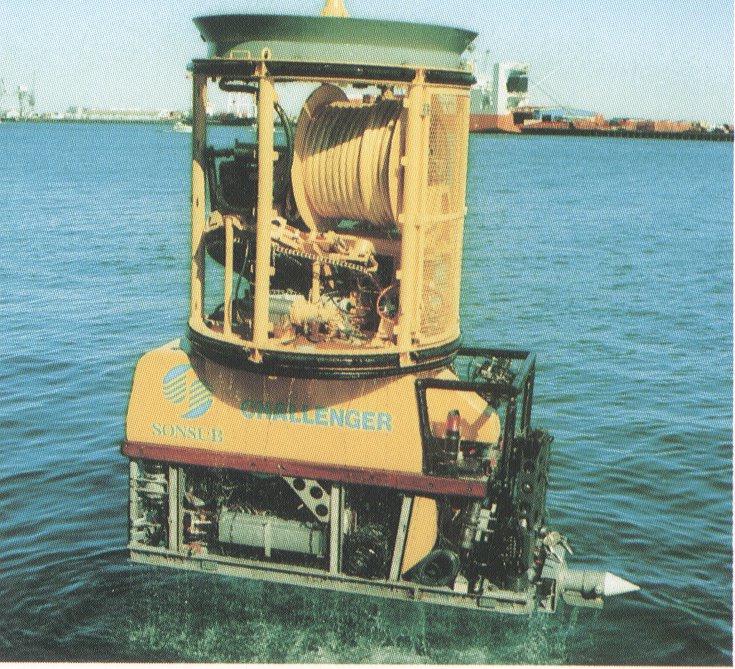
CHALLENGER ROV The Challenger ROV was designed and developed by Sonat Underwater Services during 1984 to 1985. The design concept was submitted to several ROV manufactures. Perry offshore was the successful candidate and developed the Challenger concept with Sonat into a Heavy ROV work system. The design changed several times but by late may 1985 the first Challenger ROV was ready for Sea trials off Cape Canaveral. The equipment was install on a chartered NASA ship and the Trials were performed in a water depth of 1400 meters, the trials were very successful and this the first Challenger ROV was mobilised in Brazil on a dive support ship on contract to Petrobras. There was a series of vehicles built after this and a total of 8 Vehicles were built but only 7 complete ROV systems. The spare vehicle was sent to Australia to support Sonat's offshore operations for Esso Australia on the flinders tide. It can be said about the Challenger ROV that it was the first commercially successful Platform Cleaning ROV, the Challanger ROV was used in Australia and the North sea on contract performing platform cleaning and construction. The Challenger ROV was a milestone in the history of ROV work vehicles it literally set the trend for the more power full and adaptable work ROV systems you can find around the world today. |
|